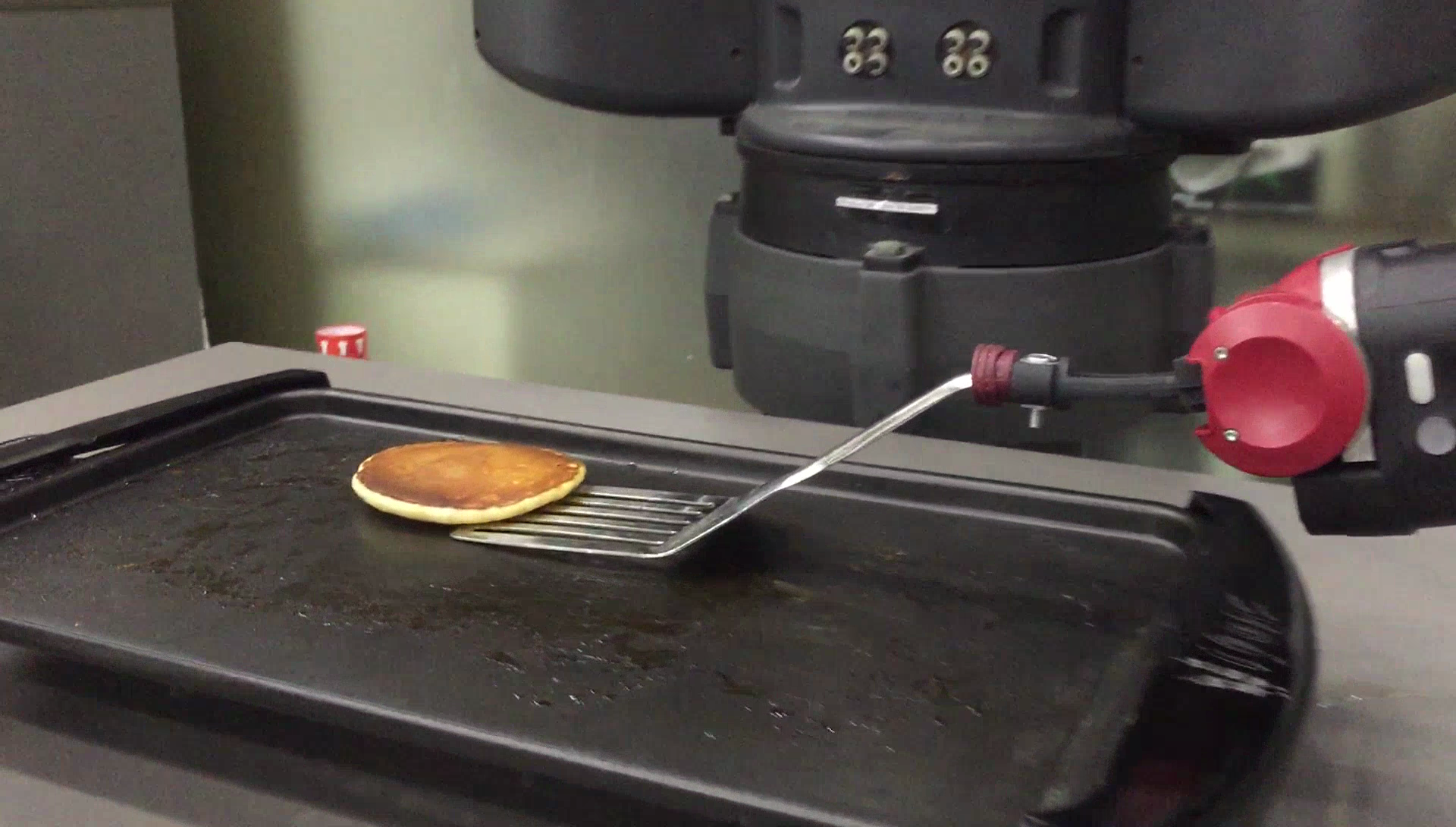
Baxter is making pancakes. NextRobotics has automated the whole process of pancake preparation with a little help from ROS and Computer Vision. The motion plan of Baxter’s arm is planned based on the output of detection through an external camera. The camera, placed at top of the hot plate, captures the image and runs the Detection Algorithm which tells the exact position of the pancake over the hot plate in form of coordinates. These coordinates are then translated into robot coordinates, a process that takes place by recording values and then estimating offset values in relation to real world coordinates, for both Baxter and Image coordinates. Based on this, Baxter moves its limb to the desired position for picking the pancake and then proceeds to the pick and flip action. In minutes it’s ready to serve!